加载中...
文章
114
标签
0
分类
10
首页
归档
标签
分类
naro
搜索
首页
归档
标签
分类
neovim
发表于
2026-03-31
|
更新于
2025-06-08
|
neovim
|
字数总计:
35
|
阅读时长:
1分钟
|
阅读量:
下载neovim
github上点击wiki,选用最新的release版本下载
nvim配置文件
使用命令
1
: = vim.fn.stdpath('config')
放弃了
文章作者:
naro-ygc
文章链接:
https://naro-ygc.cn/posts/69453faf.html
版权声明:
本博客所有文章除特别声明外,均采用
CC BY-NC-SA 4.0
许可协议。转载请注明来自
naro
!
上一篇
下一篇
naro-ygc
文章
114
标签
0
分类
10
目录
1.
下载neovim
2.
nvim配置文件
最新文章
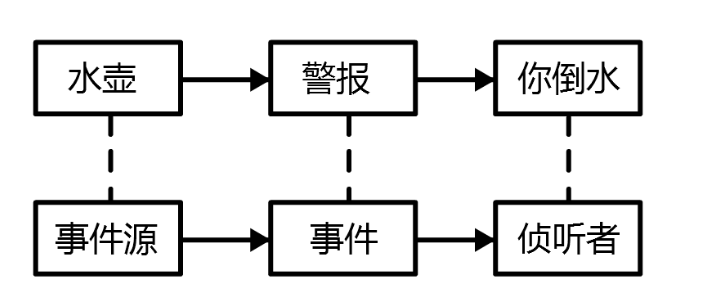
事件机制
2026-03-31
cmake学习
2026-03-31
makefile语法
2026-03-31
map
2026-03-31
vector
2026-03-31
繁
搜索
数据库加载中