AI人工智能深度学习-视觉基础
准备篇
rk的sdk编译后,buildrootd的output生成了两个目录,alientek_rv1126存
放的是文件系统镜像和交叉编译工具,而alientek_rv1126_recovery存放的
是内核kerner,设备树dtb,ramdisk组成的根文件系统。
alientek_rv1126的build中的文件是从buildroot中的dl中解压过去的。

- rv1126进行学习
1、 图像相关知识点
1-1、 RKAIQ宏定义
图像传感器获取的数据是raw数据,没有经过任何处理的图像数据。是光源信号转化为数字信号最原始的数据,如果raw图像没有经过任何的优化,没有经过任何的处理,是无法被人类查阅的。
raw数据是无损画质的图像,但是占的空间很大
1-2、文件系统分区
文件系统可以使用ls /dev查看,文件分区分为用户层区和保存一些签名的,内
核ubot相关的分区,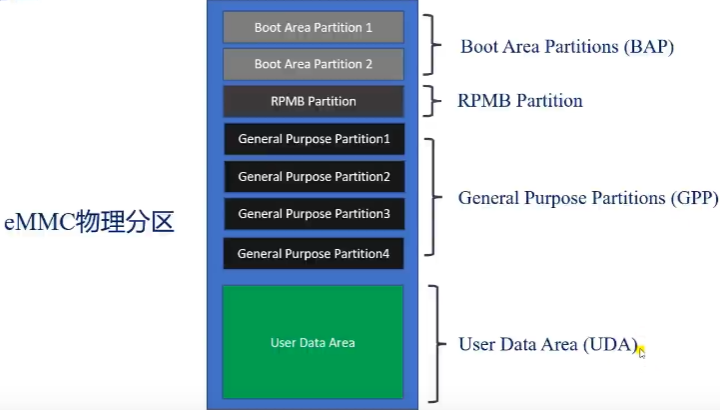
在linux系统中可以采用以下的方式查看分区信息
1 |
|
rk1126的分区文件parameter.txt存放在sdk中的rockdev中,

CMDLINE为分区的配置。
分区表的格式为:
分区大小@所在地址(分区名)
最后的-@所在地址(分区名:grow)的"-"代表将剩余的内存留给该分区,"grow"的写法只能放在CMDLINE最后。
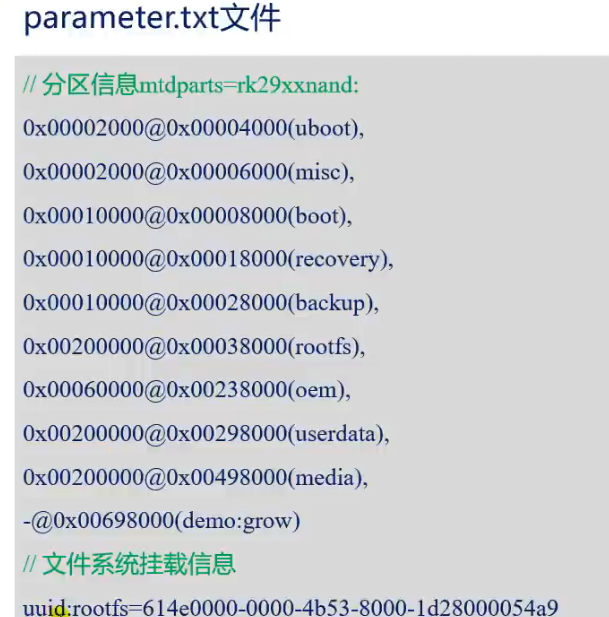
`blkid`可以查看分区的uuid
1-2-1、尝试修改分区
添加一个分区
第一步:修改分区文件parameter.txt文件。
第二步:烧录系统
第三步:格式化分区(格式化为某种格式的文件系统)
第四步:查看是否格式化成功
第五步:挂载
1-2-2、镜像烧录
在添加配置文件的时候,注意镜像存在的位置,配置文件添加上后,后面的镜像地址不一定是对的。
loader需要注意的是在编译出来的文件中并没有,镜像名字叫做MiniLoaderAll.bin,是二进制文件。
这个配置文件的修改方法是导入完配置后,修改自己镜像路径,然后在导出自
己的配置。
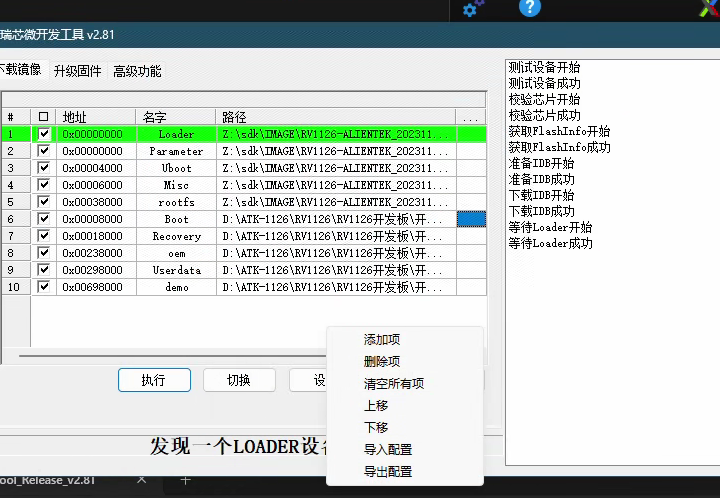
- 烧写有两种模式:“LOADER”和“MASKROM,LOADER是使用uboot为基础的。
更改分区一定要是用MASKROM模式。
烧录完成后,就能在/dev下看到新增加的分区,
使用fdisk -l可以看到分区的名字。
这个时候就完成了上面所说的第二步,
如果这个时候去挂在,很大概率是挂在不上的,
这里使用fsck -N /dev/mmcblk0p10看下设置的分区的格式,

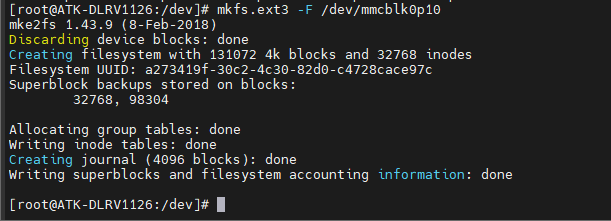
- 格式化
使用mkfs.xxx -F /dev/mmcblk0p10进行格式化操作。
- 挂载
mkdir XXX
mount /dev/mmcblk0p10 xxx
1-3、开机自启动
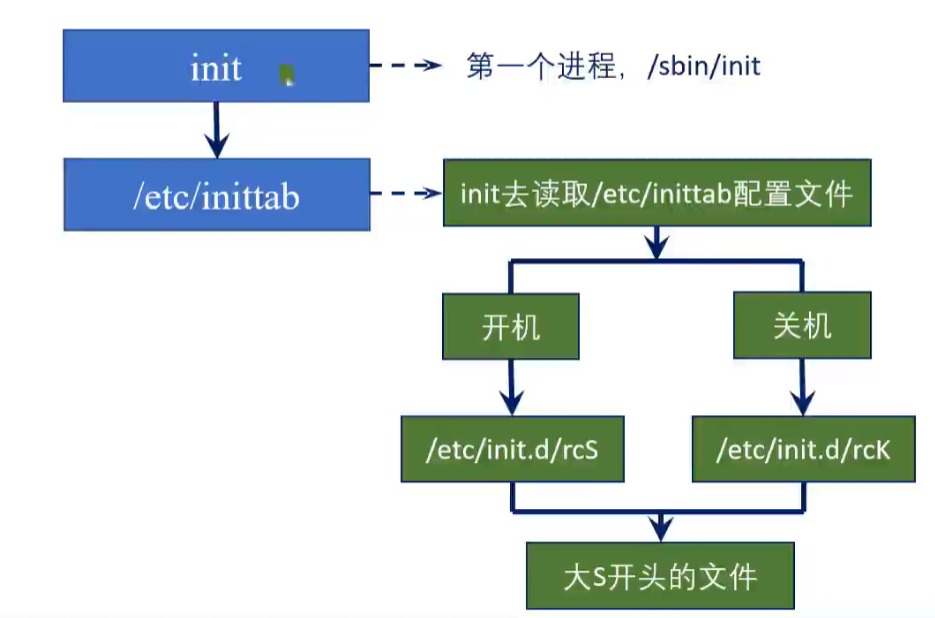
linux启动第一个运行的进程是init,它是所有进程的父进程,程序最先启动的就是它,
命令在/sbin/init,它启动之后要去读/etc/inittab配置文件 。
/etc/inittab文件的语法格式标签:运行级别:操作:进程
label:runlevel:action:process
label登记项标识符,表示输入的值
| 标示项 | 作用 |
|---|---|
| id | 用来定义缺省的init运行级别(runlevel) |
| si | 系统初始化的进程 |
| ln | 指明该进程可以使用的runlevel的级别 (级别为0-6,共7个运行级别) |
| ud | 升级进程的ud值可以唤醒/sbin/update进程,该进程为了保持磁盘的完整性,对磁盘进行i/o操作前清空了整个的i/o缓冲区 |
| ca | 当按下ctrl+alt+del时运行的进程 |
| pf | 当ups表明断电时运行的进程 |
| pr | 在系统真正关闭之前,ups发出电源恢复信号时需要运行的程序 |
| x | 将系统转入x终端时需要运行的程序 |
runlevel运行级别
| 级别 | 作用 |
|---|---|
| runlevel 0 | 系统停机状态,系统默认运行级别不能设置为0,否则不能正常启动 |
| runlevel 1 | 单用户工作模式,root权限,用于系统维护,禁止远程登陆 |
| runlevel 2 | 多用户工作模式(但不支持NFS),命令行模式登录 |
| runlevel 3 | 完全的多用户工作模式(有NFS),命令行模式登录 |
| runlevel 4 | 系统未使用的模式。保留 |
| runlevel 5 | x11图形模式,登陆后进入图形GUI模式 |
| runlevel 6 | 系统正常关闭并且重启,默认运行级别不能设置为6,否则不能正常启动 |
开发板的文件系统没有设置有文件级别,可以尝试到ubuntu下查看。
使用runlevel这个命令可以查看当前的系统处于什么模式下。
在开发版中,可以不对上面的两项进行设置。 (两项主要时label和runlevel两项)
action操作
| 标示项 | 作用 |
|---|---|
| boot | 只在系统运行时启动 |
| bootwait | 在系统启动运行时,系统启动后,当第一次从单用户模式 |
| sysinit | 在运行boot或者bootwait进程之前运行,指定的进程在访问控制台之前执行(为init提供初始化命令的路径) |
| respawn | 不管何时终止都重新启动进程 (每当相应的进程终止执行便会重新启动) |
| shutdown | 当关机时要运行的进程 |
| ctrlaltdel | 当ctrl + alt + del 三个键同时按下时运行 |
| wait | 告诉init 必须等到相应的进程完成之后才能继续执行 |
process进程
意思就是一些可执行的文件,或者命令什么的。
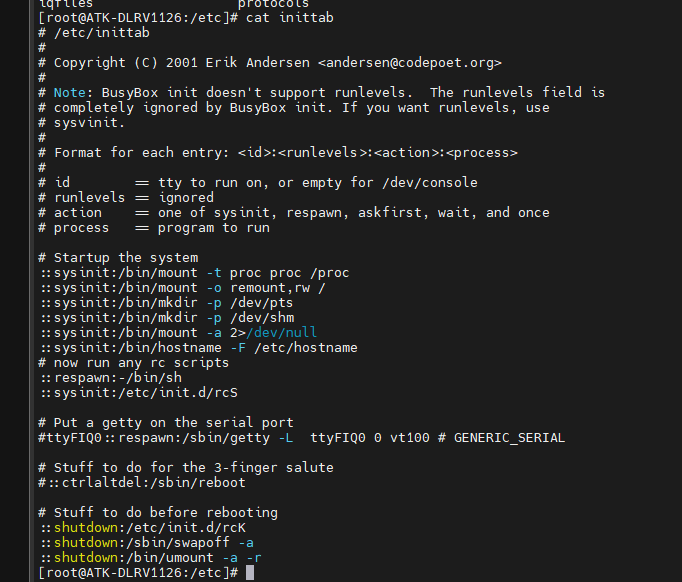
第一个,挂在proc文件系统。通过这个proc文件系统,内核和用户就可以通讯了。
第二个,重新挂在,权限可读可写,挂载在根文件目录。
这里的mount -a 2 > /dev/null 相当于黑洞,2是标准输出,定向到/dev/null,意思就是丢弃。
::sysinit /bin/hostname -F /etc/hostname 显示主机名。
::respawn :/bin/sh 作用是初始化shell终端。
::sysinit:/etc/init.d/rcS在访问控制台之前先访问这个脚本(重点)。
而关机的操作就是下面的stuff to do before rebooting
操作代号为shutdown
::shutdown: /etc/init.d/rcK 关机的时候要执行这个脚本。
::shutdown: /sbin/swapoff -a 在linux下内存管理,必须使用交换区来使用虚拟内存,这个命令就是关闭虚拟内存。
如果需要打开交换区,使用的命令是swapon命令
::shutdown: /bin/umont -a -r 表示在关机的时候要卸载所有的内存。
- 而在于init.d目录下,在inittab中有开机的时候会区执行一个脚本。
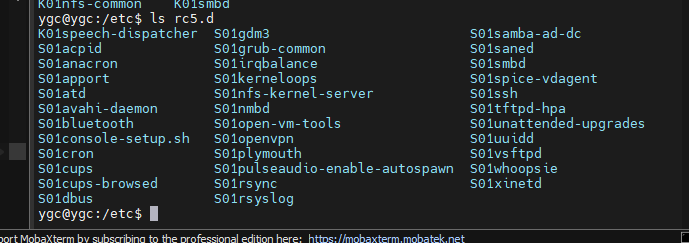
上图ubutnu系统中,以s开头的代表开机时要运行的脚本,以k开头代表关机时要运行的脚本。
格式是k/s+数字+字符串.sh,这里数字很重要,代表运行的优先级,数字越小优先级越高,如果优先级相同,
则使用后面字符串的ascii码值,码值越小,运行级别越高。从脚本的字符串可以看出运行脚本的作用。
一般执行完更改的操作后,要使用sync同步一下缓存。
系统中有一个守护进程,start-stop-daemon这个命令就是开启守护进程。
/sbin/ifup 这个命令一般是用来启动网络的,这些命令一般在系统启动后的开机脚本中都会用到。
- 扩展
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16start-stop-daemon
start-stop-daemon是OpenRC计划的一部分,这个程序最先出现在Debian系的Linux发行版中,这里有个比较古老的手册页面,更详细更直观的办法当然是通过man start-stop-daemon来查看手册了。
start-stop-daemon最基本的两个功能就是--start和--stop,简写为-S和-K,然后再加上一个-s|--signal来给进程发送信号,功德圆满。
-x, --exec daemon,daemon就是真正要执行的进程脚本,比方说启动nginx,那么就是start-stop-daemon -x nginx
-p, --pidfile pidfile,指定pid文件,至于pid文件的用途就多了,stop,status都少不了它。
-n, --name,如果没有指定pid文件,那么就要通过指定name来停止进程了。
-u, --user user[:group],指定脚本用哪个用户或用户组执行,init脚本是必须使用root权限来执行的,但是它fork出来的子进程我们一般会选择一个权限较低的用户。
-b, --background,强制脚本在后台执行。
-m, --make-pidfile,这个一般和-b配合,用于生成pid文件
-d, --chdir path,切换进程的主目录,这个在构建守护进程的时候是很常用的。
-r, --chroot path,在某些安全性要求较高的情况下,我们就需要用到chroot将进程工作环境与物理环境完全隔离开来。
-1, --stdout logfile,将标准输出记录到log文件,与之相对应的就是-2, --stderr标准错误流。
-w, --wait milliseconds,进程启动后,有这个参数会等待几毫秒来检测进程是否仍然存活。
-x daemon后面跟的执行脚本必须只能是一个文件名,有些程序运行时还需要指定一些参数,比如nginx -c file来指定nginx的配置文件,使用start-stop-daemon -x "nginx -c file"是会报错的,这些程序内的参数以另一种方式加载,start-stop-daemon -x daemon -- $ARGV,这里的双横线--后面跟的所有参数就会被带到程序中了,比如start-stop-daemon -x nginx -c /etc/nginx.conf - 这些文件是通过rcS文件被启动起来的,而rcS文件是通过开机的启动配置,inittab中定义的。 同样的。rcK文件同样类似如此。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28[root@ATK-DLRV1126:/etc/init.d]# cat rcS
#!/bin/sh
# Start all init scripts in /etc/init.d
# executing them in numerical order.
#
for i in /etc/init.d/S??* ;do #这里就是取遍历启动文件,以大S开头的文件
# Ignore dangling symlinks (if any).
[ ! -f "$i" ] && continue
case "$i" in
*.sh)
# Source shell script for speed.
(
trap - INT QUIT TSTP
set start
. $i
)
;;
*)
# No sh extension, so fork subprocess.
$i start
;;
esac
done
1-4、利用开机自启动,实现静态ip的设置
- 扩展网络相关点
linux下,网络的dns放在了/etc/resolv.conf文件中。
对于网络的设置,在设置这些之前,需要关闭connman服务,否则可能导致修改不生效。
网络网卡也是在初始中启动的(需注意)。 - 设置静态ipauto eth0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
case "$1" in
start)
printf "stop connman: "
/etc/init.d/S45connman stop
echo "stop connman ok!"
echo "nameserver 8.8.8.8">> /etc/resolv.conf
;;
stop)
printf "nothing ... "
echo "........."
;; //注意这里的分号
*)
echo "Usage: $0 {start|stop|restart}"
exit 1
esac
exit $?
```
在/etc/init.d下,按照规则,创建个脚本,让它开机运行。
在启动文件中,有一个/sbin/ifup -a,这个命令就是去解析下面要说的文件。
* 配置/etc/network/interfaces
这个配置主要有几个参数
| 参数 | 作用 |
| :--------: | :--------:|
| auto | 开机启用loopback网卡 |
| iface lo inet loopback | 将lo接口设置为一个本地回环(loopback)地址 |
| | 建议:不同的接口之间配置部分必须留有一个空格 |
| auto eth0 | 开机启用eth0网卡 |
| iface eth0 inet static | 指出eth0接口使用静态(static)IP地址 |
| address 192.168.6.100 | 所设置的eth0的静态IP地址 |
| network 192.168.6.0 | 网段 |
| netmask 255.255.255.0 | 子掩码 |
| broadcast 192.168.0.255 | 广播地址 |
| gateway 192.168.6.1 | 网关 |
* 扩展 1
shell命令 ip a可以查看网络
route -n 可以查看网关
cat /etc/resolv.conf
* 扩展 2
同样是去配置/etc/network/interfaces
| 参数 | 作用 |
| :-----: | :-----: |
| auto lo | 开机启用loopback网卡 |
| iface lo inet loopback | 将lo接口设置为一个本地回环(loopback)地址 |
| |建议: 不同的接口之间配置部分必须留一个空格 |
| auto eth0 | 开机启用eth0 网卡 |
| iface eth0 inet dhcp | 指出eth0接口使用动态(dhcp)IP地址 |
有的开发板没有这个文件,例如富瀚,但是可以配置udhcpc代替。
* 扩展 3
同样的。网卡可以设置两个ip地址。
| 参数 | 作用 |
| :-----:| :------: |
| 这里接着上面写 |
| auto eth0:1 | 注意 这里有冒号 这里可以与第一行合并为一行auto eth0 eth0:1 |
| iface eth0:1 inet static|
|address xxx xxx|
| 其它类似 |
* 扩展 4
同样是去配置/etc/network/interfaces 还有一些高级的操作。可以去执行一些shell命令。
| 选项 | 描述 |
| :-----: | :------|
| pre-up | 网卡启用前的动作 |
| up | 网卡启用时候的动作 |
| post-up | 网卡启用后的动作 |
| pre-down | 网卡关闭前的动作 |
| down | 网卡关闭时动作 |
| post-down | 网卡关闭后动作 |
例如:
1、设置dns
post-up echo "nameserver 8.8.8.8">>/etc/resolv.conf
2、设置默认网关
post-up echo ip route add default via 192.168.6.1
3、网卡关闭后删除配置的默认网关
down route del default gw 192.168.6.1
或者另一种方式:
iface eth0 inet manual
up ifconfig $IFACE 0.0.0.0 up
up /demo/ip.sh
down ifconfig $IFACE down
1 |
|
#!/bin/sh
ifconfig eth0 192.168.6.100 netmask 255.255.255.0 broadcast 192.168.0.25 gateway 192.168.1.1 route add default gw 192.168.6.1
1 | # 2、RKMediak框架及其例程介绍 |
imx355_…….xml
imx415_………xml
1 | 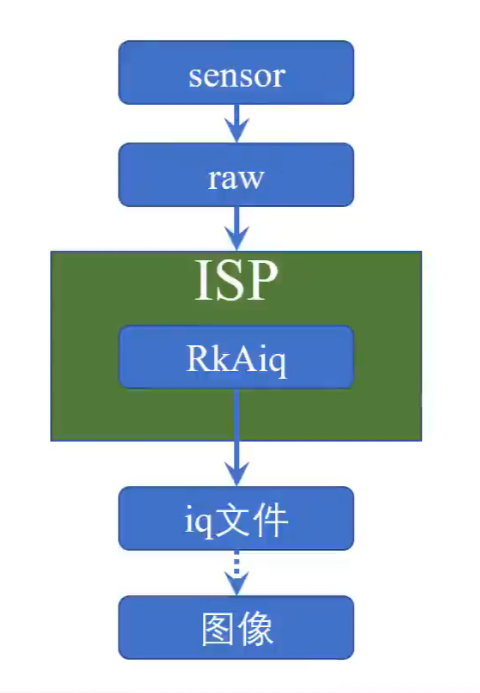 |
2-1-2 、iq文件
在不使用ispserver时,那就指定iq文件,指定iq文件时,需要使用sample_common.h和sample_commom_isp.c来对ISP进行初始化。
参考rkmedia_vi_vo_test.c中。
1 | printf("#Rkaiq XML DirPath: %s\n", iq_file_dir); |
ips相关文档放在内核doc中。Rockchip_Development_Guide_ISP2x_CN_v1.6.4。
这个例程rkmedia_vi_vo_test要测试的话,必须指定iq文件。
上面两种方法,都可以。
3、编译rkmeida
1 | //选择环境变量 RV1126_RV1109 |
在/rv1126/sdk/buildroot/output/alientek_rv1126/build/rkmedia/examples修改例程,然后make -j12就可以编译得到例程的可执行程序,这里的例程代码和external下的类似,猜测这里的代码是哪里拷贝过来的,目前我没有验证。
总体步骤总结:
在sdk源码buildroot/output/alientek_rv1126/build/rkmedia/examples下操作:
1、修改对应的.c文件。例如rkmedia_vi_vo_test.c。
2、保存修改,退出编辑后,直接make。
3、注意环境变量,如果环境变量变了,应该回到sdk源码根目录下执行source envsetup.sh alientek_rv1126指定环境变量。
4、使用adb命令或者scp命令拷贝(开发板需要网络连接)到开发板下。
sdk配置文件下查看RKMedia的配置:buildroot/configs/alientek_rv1126_defconfig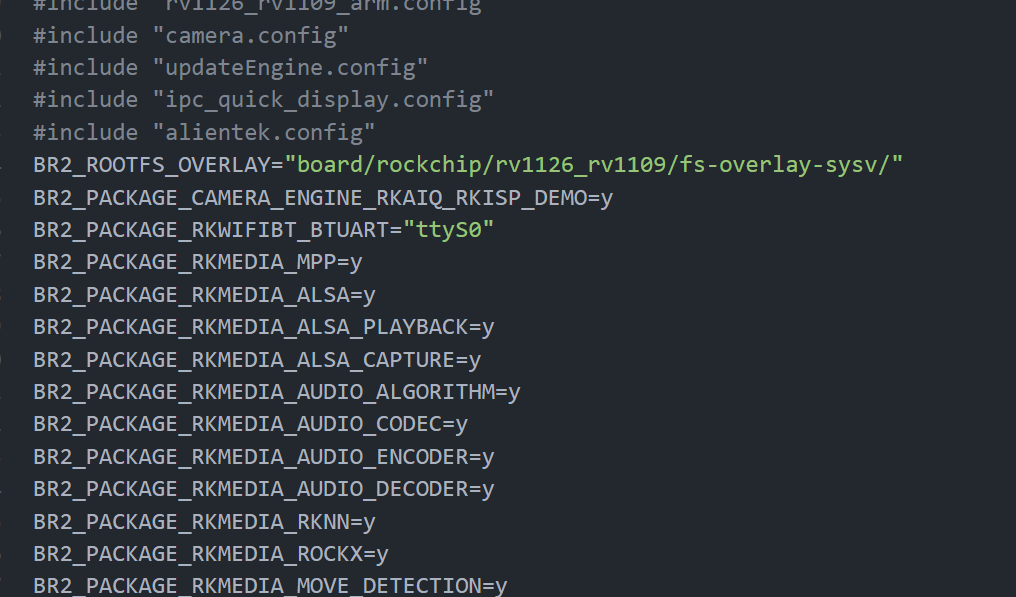
文件系统相关的配置。
- 查看和修改RKmedia的配置
1
2
3
4
5
6
7
8//选择环境变量 envsetup.sh alientek_rv1126
source envsetup.sh alientek_rv1126
//打开buildroot的menuconfig配置菜单界面
make menuconfig
//保存配置文件到buildroot/configs/alientek_rv1126_defconfig
make savedefconfig
//编译文件系统里面
./build.sh rootfs在配置菜单中按下键盘的/按键可以进行搜索
编译文件系统的同时他会去编译Rkmedia。
4、mipi屏幕
在提供的文档中有屏幕的驱动参考和介绍。
命令行输入fbset可以查看屏幕的分辨率。
1、正点原子的这块屏幕不需要校准。
2、触摸输入测试。
3、也可以通过RKmedia例程,摄像头捕获屏幕显示 rkmedia_vi_vo_test -a /etc/iqfiles/ -h 1280 -w 720
1 | //读取input event事件的值 |
紧接上面第三条:4、测试也可以通过modetest命令进行测试。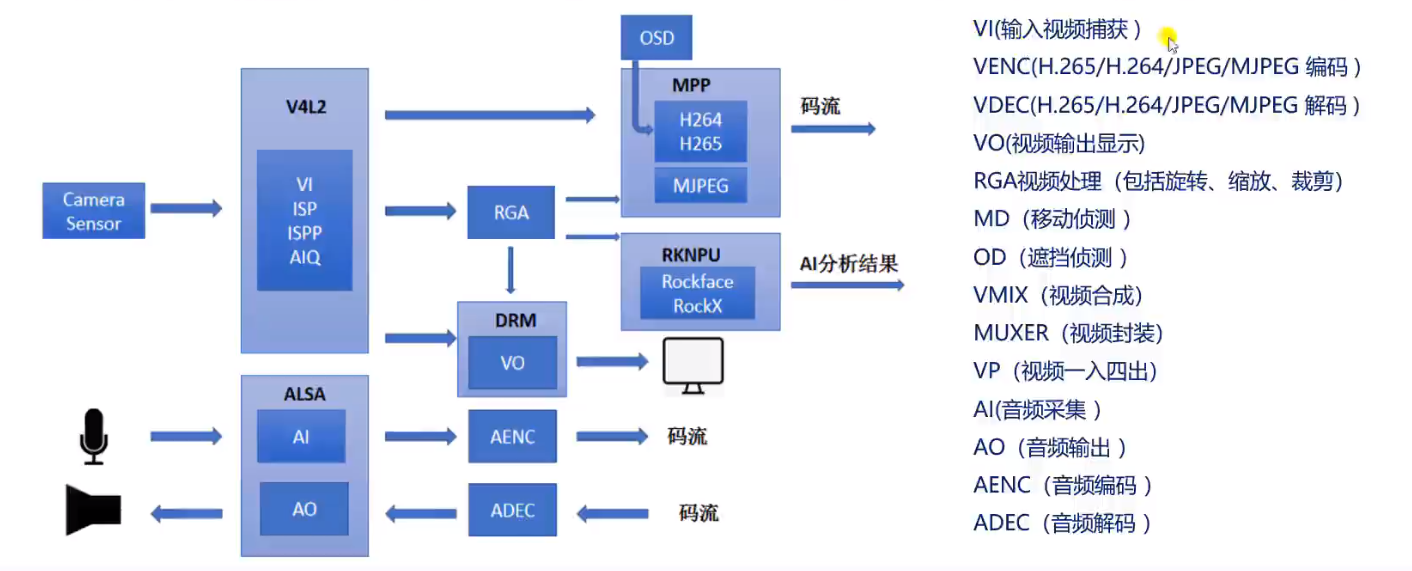
在图中的drm模块,是linux下的一个图形显示框架,也是现在主流的图形显示框架,rkmeida就是通过drm去工作的。
在开发板上有libdrm的库。使用find / -name libdrm可以搜过到。
1 | VO_CHN_ATTR_S stVoAttr = {0}; |
上面就显示了用到drm的card0设备,例子rkmedia_vi_vo_test。
而回到modetest这个命令
| 查询选项参数 | 描述 |
|---|---|
| -p | 列出CRTCs和planes,CRTCs表示VOT(Vide Output Processor),planes表示图层 |
| -e | 查询输出转换器,Encoder表示输出转换器,如RGB、LVDS、DSI等接口(显示接口,类似hdmi等) |
| -f | 列出framebuffers |
| -c | 查询Connerctor(连接设备) |
| 就是表示输出转换器和显示面板交互的部分 | |
| CRTCs一个屏幕只有一个。 |
| 通用参数选项 | 描述 |
|---|---|
| -a | 使能原子操作 |
| -d | 模式设置后放置主控器 |
| -f | 列出framebuffers |
| -c | 查询Connerctor(连接装备) |
| -M | 设置驱动,比如rk的就是rockchip |
| -D | 指定对应的ID号 |
| 测试参数选项 | 描述 |
|---|---|
| -P | 解析plane参数 |
| -S | 解析connector参数 |
| -C | 测试光标 |
| -V | 测试同步翻页(垂直同步vsync) |
| -W | 解析property |
*测试
1 | modetest --help //查看帮助 |
扩展:shell命令对于参数,<>表示必填像,[]表示可填,使用--help查看
5、摄像头
摄像头详细参数看文档
在rkmedia的rkmedia_vi_vo_test.c中存在一个RGA示范用例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18RngInfo.u8Enable = 1;
RK_MPI_VI_RGN_SetCover(s32CamId, 1, &RngInfo, &CoverInfo);
// rga0 for primary plane
RGA_ATTR_S stRgaAttr;
memset(&stRgaAttr, 0, sizeof(stRgaAttr));
stRgaAttr.bEnBufPool = RK_TRUE;
stRgaAttr.u16BufPoolCnt = 3;
stRgaAttr.u16Rotaion = 90;
stRgaAttr.stImgIn.u32X = 0;
stRgaAttr.stImgIn.u32Y = 0;
stRgaAttr.stImgIn.imgType = IMAGE_TYPE_NV12;
stRgaAttr.stImgIn.u32Width = video_width;
stRgaAttr.stImgIn.u32Height = video_height;
stRgaAttr.stImgIn.u32HorStride = video_width;
stRgaAttr.stImgIn.u32VirStride = video_height;
stRgaAttr.stImgOut.u32X = 0;
stRgaAttr.stImgOut.u32Y = 0;
这里的90是利用了RGA功能图形硬件加速做的旋转。
板子有两个摄像头插槽。
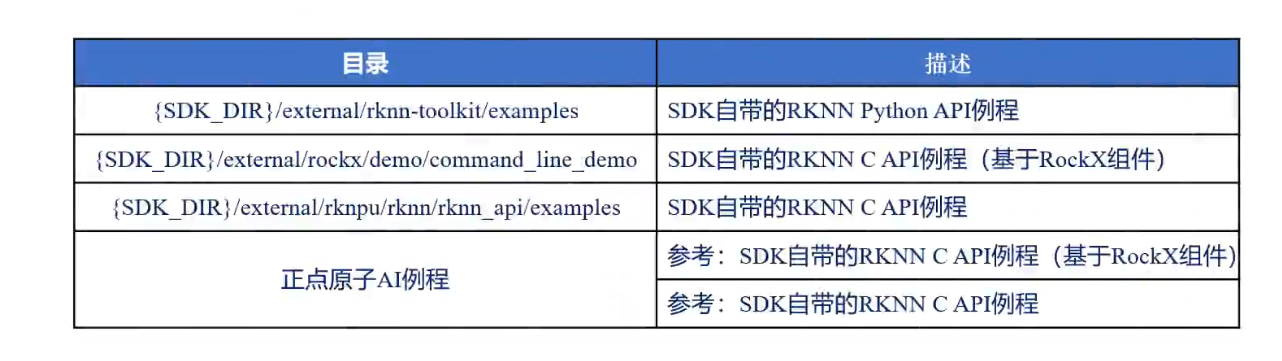
6、AI模型运行流程
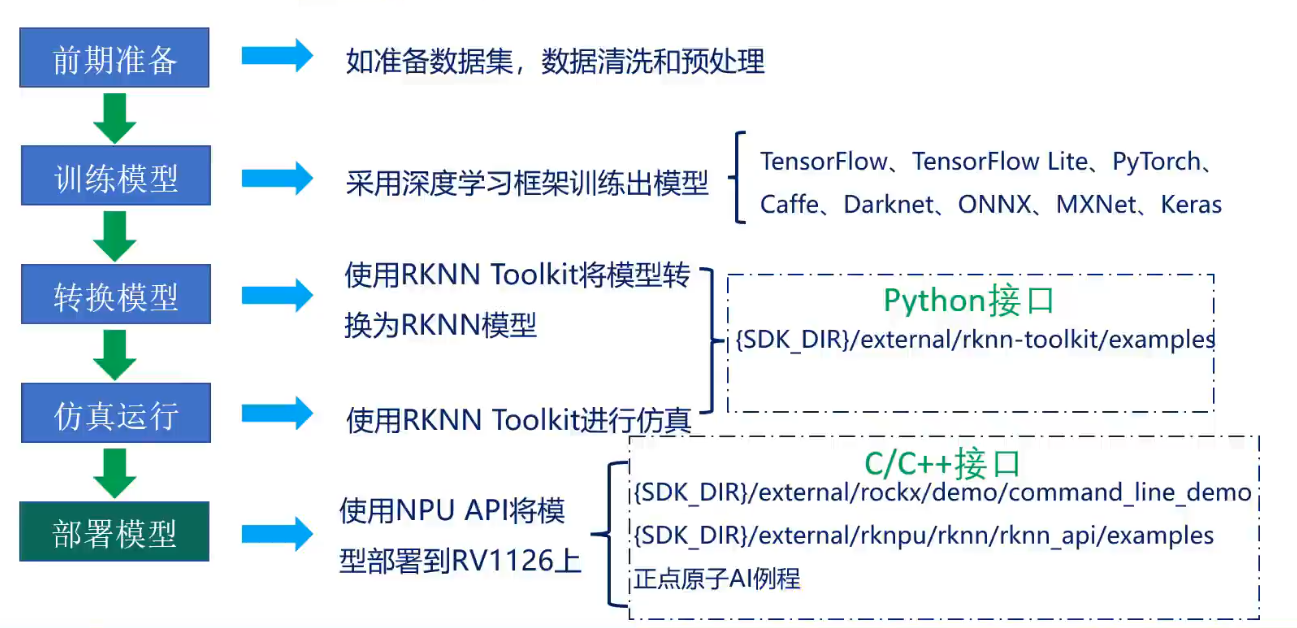
假设 :AI网络模型在pc端运行,运行的模型效果比较理想,也就是测试集的损失值比较低,正确率比较高。说明模型的泛化能力比较好。这个时候就需要转化操作。
就是将pc端的网络模型转化为RKNN模型。应为rk的npu不能运行其他框架的模型,只能运行rknn模型。通过RKNN toolkit将模型转化,然后使用这个工具
进行仿真(主要看内存,cpu情况),然后部署到板子上,
6-1、rv1126芯片介绍
内嵌了硬件视频编码器,由risc-v mcufastboot快速启动。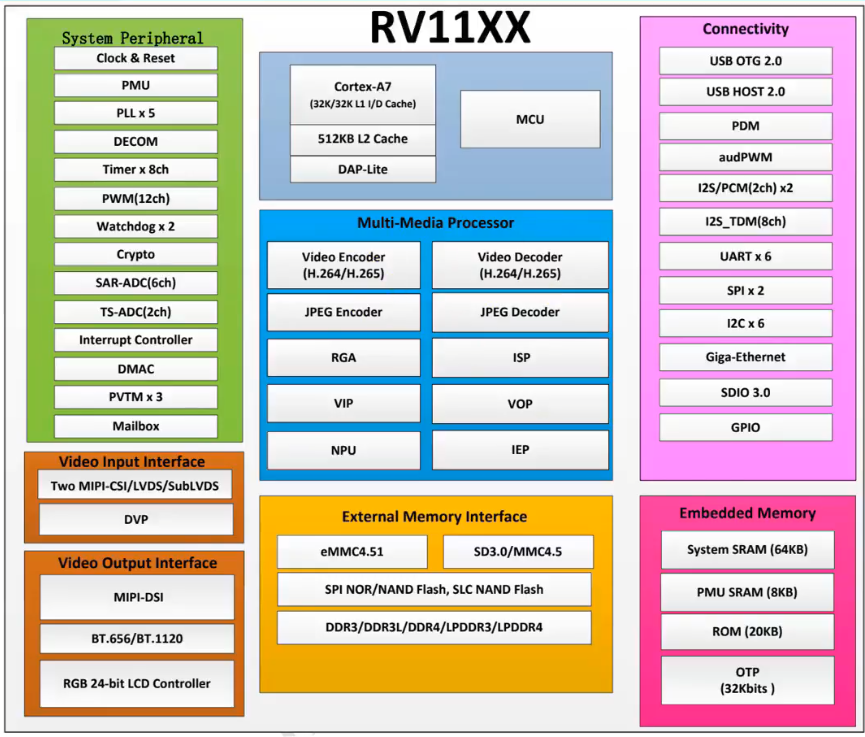
软件解码和硬件解码区别。软件解码靠cpu,简称软解。同样的,软件编码也是采用cpu处理。而硬件编解码。就是采用硬件或者模块解码。类似gpu。
芯片有通用型和专用型之分,imx6u就是通用控制,在汽车电子行业用的比较多,1126在音视频AI中用的多。
1126支持很多深度学习框架。
- AI例程主要包括三个来源,1、基于RockX进行开发,但是无法获知源码,无法进行更改,2、rockface,要钱不开源。3、采用预训练模型。采用自训练模型。
一个模型相关的参数,输入输出,均值,标准差,欧式距离,余弦距离,阈值。
rockx发布的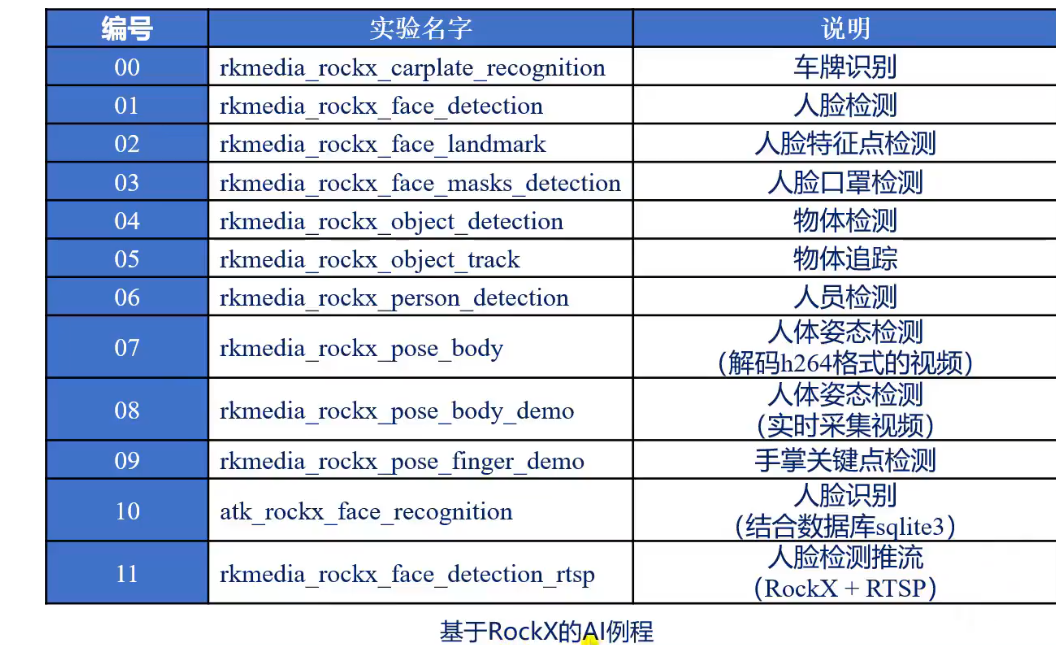
下面是预训练模型发布的
下面是开源的AI模型
6-2、 学习AI必备
1、入门python
2、学习一种传统图像处理/开源计算机视觉库
opencv 、matlab、dlib(人脸识别算法库)
3、具有一些高等数学基础
导数、偏导数、梯度、微积分、卷积、高斯滤波、概率统计、正态分布、均匀分布、熵、激活函数、方差、回归分析、聚类算法、贝叶斯算法、线性代数等
4、选择一种深度学习框架
tensorflow tensorflow lite 、pytorch、 caffe等
5、UI界面开发学习
qt
6、其他学习
数据库
sqlite3 mysql
基于平台进行开发,rk平台的文件系统时buildroot文件系统。在其他模型通过RKNN Toolkit进行转换后,使用RkNN C API进行调用。
- 交叉编译器我放到了/home/ygc/Desktop/linux-gcc下
节点1.5第6.37秒