常见的总线和通讯方式
I2C 总线
I2C(Inter-Integrated Circuit,集成电路间通讯)是一种用于在多个集成电路之间进行数据交换的协议,它使用 two-wire(两线)通信协议,通常由两个 GPIO(通用输入输出)引脚组成,通常为 SDA(数据线)和 SCL(时钟线)。I2C 总线具有以下特点:
- 半双工通信:在同一时间内,数据线(SDA)只能由一个设备控制。
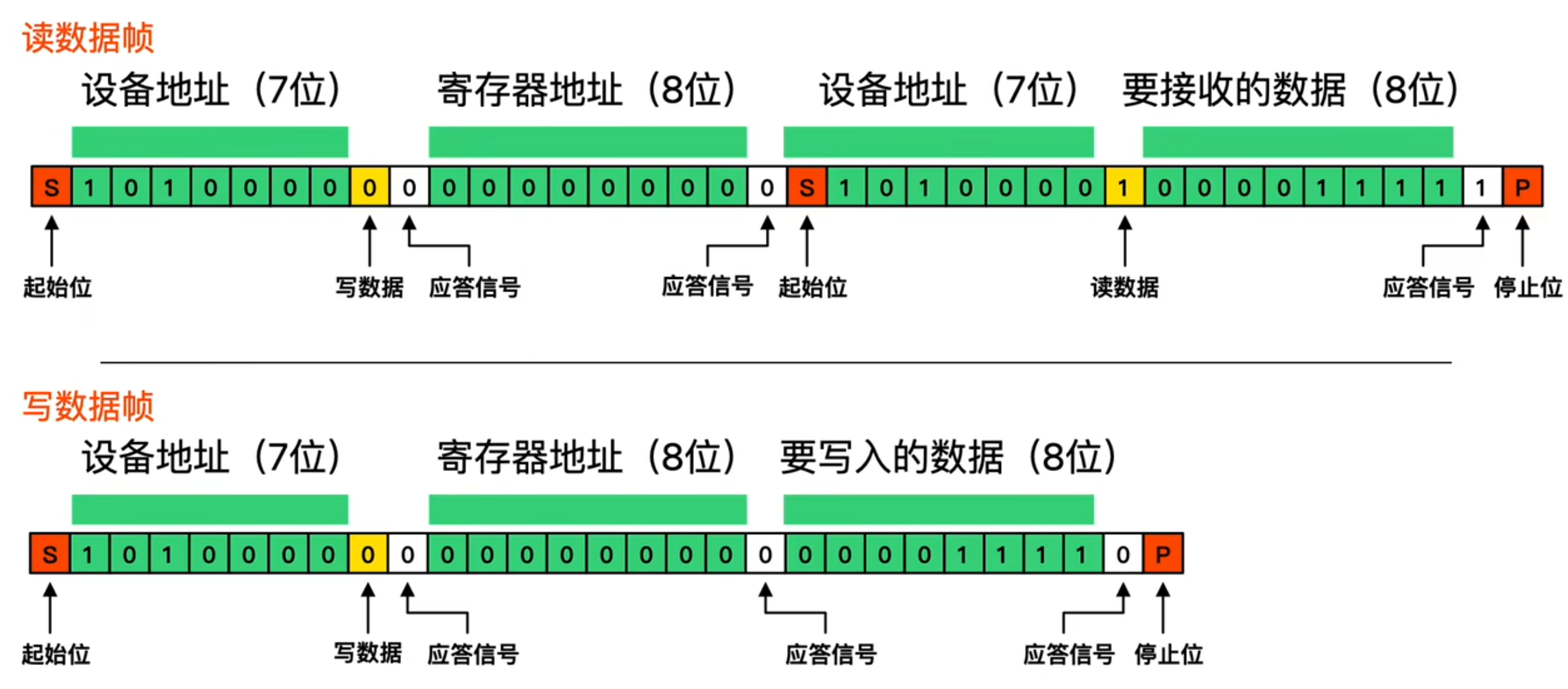
以下是一次典型的 I2C 数据传输流程(包含 8 位数据帧): - 起始条件:主设备发起起始信号,表示数据传输开始。
- 从机地址:主设备发送 7 位的从机地址和 1 位的读写位(0 表示写,1 表示读)。
- 应答信号:从设备接收到地址后,会发送一个应答位(ACK)表示已正确接收。
- 数据传输:主设备或从设备开始传输 8 位的数据。
- 应答信号:每传输完 8 位数据,接收方会发送一个应答位。
- 停止条件:主设备发起停止信号,表示数据传输结束。
如果通讯过程中如果从机反应比较慢,这时候从机是可以把时钟线拉低来让主机等待的,很多拿GPIO模拟的I2C都没实现。还有就是I2C总线是允许多主机的,多主机如何避免冲突等等。实际使用中,像STM32出现I2C控制器异常,直接将外设复位可能都无法恢复
1 |
|
代码说明:
- 引脚定义:SDA 和 SCL 分别定义为 P2.0 和 P2.1 引脚,你可以根据实际情况修改。
- 延时函数:delay_us 函数用于产生适当的时钟周期,确保 I2C 通信的时序要求。
- 起始信号:I2C_Start 函数通过将 SDA 和 SCL 置高,然后将 SDA 拉低来产生起始信号。
- 停止信号:I2C_Stop 函数通过将 SDA 拉低,SCL 置高,然后将 SDA 拉高来产生停止信号。
- 应答信号:I2C_SendACK 函数用于发送应答信号,I2C_RecvACK 函数用于接收应答信号。
- 数据发送和接收:I2C_SendByte 函数用于发送一个字节的数据,I2C_RecvByte 函数用于接收一个字节的数据。
- 主函数:在 main 函数中,演示了如何向从设备发送一个字节的数据,包括起始信号、发送从设备地址、发送数据和停止信号。
1-2、硬件I2C
- 在使用硬件 I2C(Inter - Integrated Circuit)接口时,通常需要配置以下几类重要参数:
通信速率
I2C 总线支持多种通信速率模式,不同的应用场景可能需要不同的速率,常见的配置选项有: - 标准模式(Standard Mode):速率为 100 kbps,这是最常用的速率,适用于大多数对通信速度要求不高的场合,比如连接一些传感器、EEPROM 等设备。
- 快速模式(Fast Mode):速率可达 400 kbps,能提供相对较快的数据传输速度,在一些对数据更新频率有一定要求的系统中使用,例如某些高速 ADC 芯片的通信。
- 快速模式 +(Fast Mode Plus):速率最高可到 1 Mbps,进一步提升了数据传输效率,适用于对数据实时性要求较高的场景。
- 高速模式(High - Speed Mode):速率能达到 3.4 Mbps,用于对通信速度有极高要求的特殊应用。
从机地址
在 I2C 总线上,每个从设备都有一个唯一的 7 位或 10 位地址,主设备通过该地址来选择与之通信的从设备。配置时需要明确以下内容:
- 地址位数:确定使用 7 位地址还是 10 位地址模式。大多数 I2C 设备采用 7 位地址,而 10 位地址模式主要用于需要更多从设备地址的复杂系统。
具体地址值:根据从设备的数据手册,获取其实际的地址值,并在硬件 I2C 配置中进行设置。
时钟极性(CPOL)和时钟相位(CPHA)
这两个参数用于定义 I2C 总线时钟信号的特性,它们共同决定了数据采样和变化的时刻: - 时钟极性(CPOL):指定时钟信号的空闲状态电平。当 CPOL = 0 时,时钟信号空闲时为低电平;当 CPOL = 1 时,时钟信号空闲时为高电平。
- 时钟相位(CPHA):决定数据采样和变化的时刻。当 CPHA = 0 时,数据在时钟信号的第一个边沿(上升沿或下降沿,取决于 CPOL)采样;当 CPHA = 1 时,数据在时钟信号的第二个边沿采样。
应答机制
I2C 通信中,接收方在接收到每个字节后需要发送一个应答信号(ACK)或非应答信号(NACK)来表示是否成功接收数据,需要配置以下方面:
- 应答使能:开启或关闭应答功能,一般情况下需要使能该功能以确保通信的可靠性。
- 应答判断:在主设备接收数据时,需要判断从设备返回的应答信号是 ACK 还是 NACK,以决定后续的操作。
中断配置
为了提高系统的实时性和效率,可以配置硬件 I2C 的中断功能:
- 中断使能:开启相应的中断源,如数据传输完成中断、应答错误中断等。
- 中断优先级:设置不同中断的优先级,确保重要的中断能够及时得到处理。
数据缓冲区
硬件 I2C 通常配备有数据缓冲区,用于临时存储发送和接收的数据,需要进行如下配置:
- 缓冲区大小:根据实际应用需求,选择合适的缓冲区大小,以满足数据传输的要求。
- 缓冲区操作:配置数据的写入和读取方式,例如是采用 DMA(直接内存访问)方式还是 CPU 直接操作。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 naro!